


برت آدکاک، بنیانگذار و مدیرعامل Figure، روز پنجشنبه مدل یادگیری ماشین جدیدی برای رباتهای انساننما معرفی کرد. این خبر، که دو هفته پس از اعلام تصمیم شرکت رباتیک Bay Area برای قطع همکاری با OpenAI منتشر میشود، بر روی هلیکس، یک مدل “عمومی” Vision-Language-Action (VLA) متمرکز است.
مدلهای VLA پدیدهای جدید در رباتیک هستند که از دستورات بصری و زبانی برای پردازش اطلاعات استفاده میکنند. در حال حاضر، بهترین نمونه شناختهشده از این دسته، مدل RT-2 گوگل دیپمایند است که رباتها را از طریق ترکیبی از ویدئو و مدلهای زبان بزرگ (LLM) آموزش میدهد.
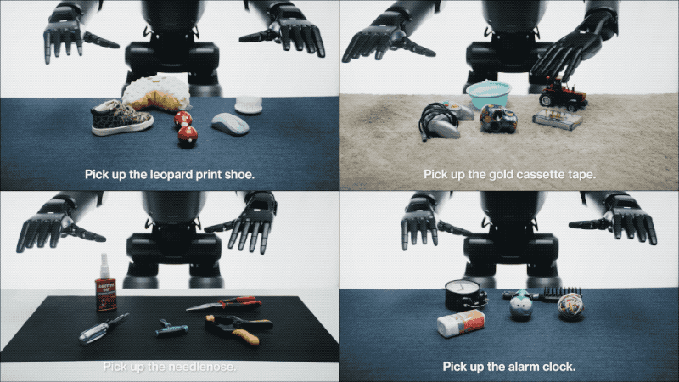
هلیکس نیز به شیوه مشابهی عمل میکند و دادههای بصری و دستورات زبانی را ترکیب کرده تا ربات را بهصورت آنی کنترل کند. Figure مینویسد: “هلیکس توانایی تعمیم اشیاء را به خوبی نمایش میدهد، بهطوری که میتواند هزاران کالای خانگی جدید با اشکال، اندازهها، رنگها و ویژگیهای متریالی که قبلاً در آموزش با آنها روبهرو نشده، تنها با استفاده از دستورات زبان طبیعی بردارد.”
در دنیای ایدهآل، شما فقط کافی است به یک ربات بگویید کاری را انجام دهد و آن ربات آن را انجام میدهد. به گفته Figure، اینجاست که هلیکس وارد میشود. این پلتفرم برای پر کردن شکاف بین پردازش بینایی و زبان طراحی شده است. پس از دریافت یک دستور صوتی به زبان طبیعی، ربات محیط خود را از نظر بصری ارزیابی کرده و سپس وظیفه را انجام میدهد.
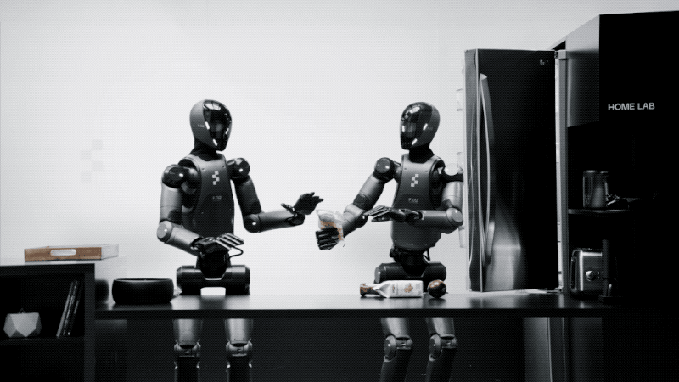
Figure مثالهایی مانند “کیسه کوکیها را به ربات سمت راست خود بده” یا “کیسه کوکیها را از ربات سمت چپ خود بگیر و در کشوی باز قرار بده” ارائه میدهد. هر دوی این مثالها شامل همکاری دو ربات هستند. این به این دلیل است که هلیکس به گونهای طراحی شده که میتواند دو ربات را همزمان کنترل کند و یکی به دیگری در انجام کارهای مختلف خانه کمک کند.
Figure با نمایش کارهایی که شرکت با ربات انساننمای ۰۲ خود در محیط خانه انجام داده، مدل VLM را معرفی میکند. خانهها بهطور سنتی برای رباتها مشکلساز هستند، چرا که برخلاف انبارها و کارخانهها، فاقد ساختار و ثبات هستند.
مشکلات یادگیری و کنترل موانع عمدهای هستند که بین سیستمهای رباتیک پیچیده و محیط خانه قرار دارند. این مشکلات، به همراه قیمتهای پنج تا شش رقمی، دلیل اصلی این است که رباتهای خانگی هنوز اولویت اصلی برای بیشتر شرکتهای رباتیک انساننما نبودهاند. به طور کلی، رویکرد این است که رباتها برای مشتریان صنعتی ساخته شوند، ابتدا قابلیت اطمینان آنها بهبود یابد و هزینهها کاهش یابد، سپس به سراغ خانهها بروند. انجام کارهای خانه فعلاً موضوعی برای چند سال آینده است.
وقتی که تیم TechCrunch در سال ۲۰۲۴ از دفاتر Figure در منطقه Bay Area بازدید کرد، آدکاک برخی از مراحل آزمایشی که ربات انساننمای شرکت در محیط خانه انجام میداد را نشان داد. به نظر میرسید که در آن زمان این کارها در اولویت قرار نداشتند، زیرا Figure بیشتر روی پروژههای آزمایشی در محیطهای کاری با شرکتهایی مانند BMW تمرکز داشت.
با اعلام هلیکس در روز پنجشنبه، Figure بهطور واضح اعلام میکند که خانه باید بهطور مستقل در اولویت قرار گیرد. این محیط برای آزمایش این نوع مدلهای آموزشی چالشی و پیچیده است. آموزش رباتها برای انجام وظایف پیچیده در آشپزخانه — برای مثال — آنها را به مجموعه وسیعی از فعالیتها در محیطهای مختلف میبرد.
Figure میگوید: “برای اینکه رباتها در خانهها مفید باشند، باید قادر باشند رفتارهای هوشمندانه جدید را بهطور آنی تولید کنند، بهویژه برای اشیایی که قبلاً ندیدهاند.” “آموزش حتی یک رفتار جدید برای رباتها در حال حاضر نیازمند تلاش انسانی قابل توجهی است: یا ساعتها برنامهنویسی دستی در سطح دکترا یا هزاران بار نمایش آن رفتار.”
برنامهنویسی دستی برای خانه مقیاسپذیر نخواهد بود. به سادگی تعداد ناشناختهها بسیار زیاد است. آشپزخانهها، اتاقهای نشیمن و حمامها از یکدیگر تفاوت زیادی دارند. همین موضوع برای ابزارهای استفاده شده در پخت و پز و تمیز کردن نیز صادق است. علاوه بر این، مردم آشغال میریزند، مبلمان را جابهجا میکنند و ترجیح میدهند که نورپردازی محیطی متفاوت داشته باشند. این روش زمان و هزینه زیادی میبرد — هرچند Figure قطعاً پول زیادی برای این کار دارد.
گزینه دیگر آموزش است — و آموزش بسیار زیاد. دستهای رباتی که برای برداشتن و قرار دادن اشیاء در آزمایشگاهها آموزش میبینند، اغلب از این روش استفاده میکنند. چیزی که نمیبینید، صدها ساعت تکرار است که برای انجام کارهای متغیر بهقدر کافی قوی میشود. برای اینکه یک ربات بتواند چیزی را از ابتدا بهدرستی بردارد، باید صدها بار قبلاً این کار را انجام داده باشد.
مثل بسیاری از مسائل پیرامون رباتیک انساننما در حال حاضر، کار روی هلیکس هنوز در مراحل اولیه است. بینندگان باید بدانند که بسیاری از کارها در پشت صحنه برای ایجاد ویدیوهای کوتاه و با کیفیتی که در این پست مشاهده میشود، انجام میشود. اعلامیه امروز در واقع ابزاری برای جذب مهندسان بیشتر به منظور کمک به رشد این پروژه است.
منبع: تککرانچ







