

مقدمه
ماشینهای خودران تنها وسایل نقلیهای با قابلیت حرکت خودکار نیستند؛ بلکه مجموعهای از سیستمهای هوشمند و پیچیدهاند که با استفاده از فناوریهای پیشرفته میتوانند بدون نیاز به راننده، مسیر خود را تشخیص داده و تصمیمگیری کنند. این خودروها ترکیبی از سختافزارها و نرمافزارهای مختلف را به کار میگیرند تا بتوانند محیط اطراف خود را درک کرده، موانع را شناسایی کنند، مسیر مناسب را انتخاب کرده و بدون دخالت انسان بهطور ایمن حرکت کنند.
یکی از مهمترین ویژگیهای ماشینهای خودران، توانایی آنها در تحلیل دادههای محیطی است. این خودروها با استفاده از سنسورهای پیشرفته، مانند لیدار، رادار، دوربین و حسگرهای اولتراسونیک، اطلاعات دقیقی از محیط پیرامون خود دریافت میکنند. سپس این دادهها توسط الگوریتمهای پیچیده یادگیری ماشین و هوش مصنوعی پردازش میشوند تا بهترین تصمیم در لحظه گرفته شود.
فناوری ماشینهای خودران بهطور مداوم در حال پیشرفت است و شرکتهای بزرگی مانند تسلا، گوگل (Waymo) و سایر خودروسازان روی بهینهسازی این سیستمها کار میکنند. در این پست، اجزای کلیدی که این خودروها را قادر به حرکت میسازند، بررسی خواهیم کرد.
سنسورها: چشمهای ماشینهای خودران
ماشینهای خودران برای حرکت بدون نیاز به راننده باید محیط اطراف خود را درک کنند، موانع را شناسایی نمایند، مسیرهای مناسب را انتخاب کنند و در نهایت، تصمیمات هوشمندانهای برای حرکت بگیرند. این سطح از درک محیط بدون مجموعهای از سنسورها که بهعنوان «چشمهای» خودرو عمل میکنند، امکانپذیر نیست.
سنسورهای مختلفی در ماشینهای خودران استفاده میشوند که هرکدام نقش منحصربهفردی در پردازش دادههای محیطی دارند. در این مقاله، به بررسی دقیق چهار نوع سنسور اصلی یعنی لیدار (LiDAR)، دوربینها، رادار و سنسورهای اولتراسونیک میپردازیم.

۱. لیدار (LiDAR): اسکن سهبعدی محیط با دقت بالا
لیدار چیست و چگونه کار میکند؟
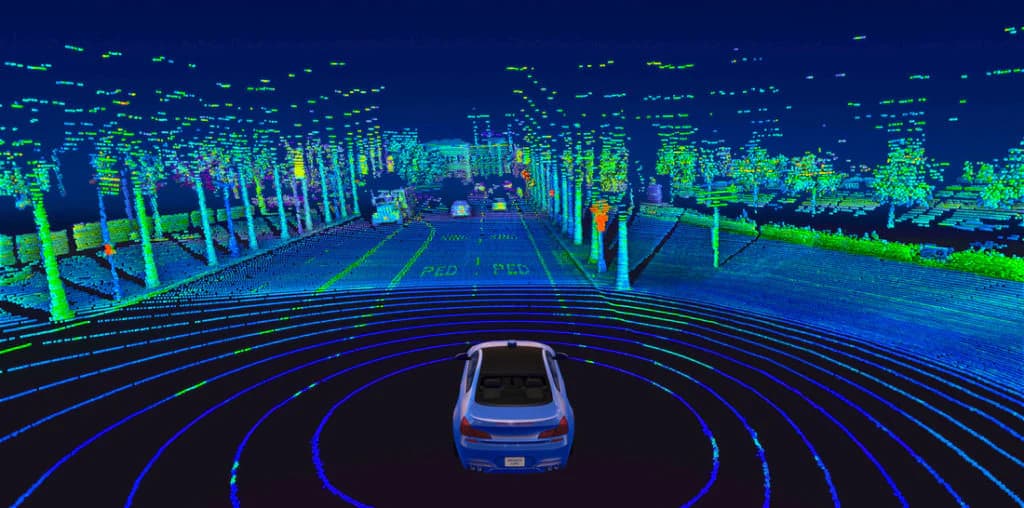
لیدار (Light Detection and Ranging) یک فناوری بر پایه نور است که از پالسهای لیزری برای اندازهگیری فاصله تا اشیای مختلف استفاده میکند. این فناوری به خودرو امکان میدهد تا محیط اطراف خود را با جزئیات بالا نقشهبرداری کند و درک دقیقی از فاصله، ابعاد و موقعیت اجسام به دست آورد.
سیستم لیدار با ارسال هزاران پرتو لیزری در ثانیه، و سپس دریافت بازتاب آنها، اطلاعات کاملی از محیط را بهدست میآورد. نتیجه این فرآیند، یک نقشه سهبعدی دقیق از محیط اطراف خودرو است که میتواند برای تشخیص موانع، سایر وسایل نقلیه، خطوط جاده و حتی تغییرات سطح جاده استفاده شود.
مزایای لیدار
- دقت بالا: لیدار قادر است اشیا را با دقت بسیار زیاد تشخیص داده و موقعیت آنها را در فضا تعیین کند.
- دید در شب: برخلاف دوربینها که وابسته به نور محیط هستند، لیدار در شب و شرایط کمنور نیز عملکرد مناسبی دارد.
- تشخیص اشیا و موانع کوچک: لیدار حتی میتواند موانع کوچکی مانند موانع خیابانی، حیوانات و اشیای رها شده را نیز تشخیص دهد.
محدودیتهای لیدار
- هزینه بالا: حسگرهای لیدار هنوز گران هستند و این موضوع یکی از چالشهای بزرگ در تولید انبوه خودروهای خودران محسوب میشود.
- عملکرد ضعیف در شرایط آبوهوایی نامناسب: مه، باران شدید یا برف میتواند عملکرد لیدار را کاهش دهد.
- محدودیت در تشخیص رنگها و نوشتهها: لیدار فقط بر اساس فاصله و شکل اجسام کار میکند و نمیتواند رنگ یا نوشتهها را تشخیص دهد.
۲. دوربینها: درک بصری از محیط جاده
نقش دوربینها در ماشینهای خودران
دوربینها یکی از مهمترین سنسورهای مورد استفاده در خودروهای خودران هستند. برخلاف لیدار که تنها یک مدل سهبعدی از محیط ایجاد میکند، دوربینها قادرند جزئیات بصری مانند علائم راهنمایی و رانندگی، خطوط جاده، چراغهای راهنمایی، عابران پیاده و رنگ خودروها را تشخیص دهند.
دوربینهای مورد استفاده در خودروهای خودران معمولاً در چند جهت مختلف قرار میگیرند تا دید کاملی از محیط ایجاد کنند. این دوربینها تصاویر را دریافت کرده و سپس با استفاده از هوش مصنوعی و الگوریتمهای پردازش تصویر، اطلاعات حیاتی را استخراج میکنند.
مزایای استفاده از دوربینها
- تشخیص علائم راهنمایی و رانندگی: لیدار و رادار نمیتوانند تابلوهای جاده را تشخیص دهند، اما دوربینها میتوانند اطلاعاتی مانند محدودیت سرعت، چراغهای راهنمایی و هشدارهای جادهای را بخوانند.
- درک جزئیات محیط: دوربینها قادرند خطوط جاده، وضعیت ترافیک و مسیرهای ویژه را شناسایی کنند.
- تشخیص اشیا متحرک: هوش مصنوعی میتواند از طریق پردازش تصاویر، عابران پیاده و دیگر وسایل نقلیه را تشخیص داده و حرکت آنها را پیشبینی کند.
محدودیتهای دوربینها
- نیاز به نور مناسب: دوربینها در شرایط کمنور، شب یا هنگام باران و مه ممکن است عملکرد ضعیفی داشته باشند.
- تشخیص نادرست در شرایط خاص: انعکاس نور، سایهها و تغییرات ناگهانی نور ممکن است باعث خطا در تشخیص تصاویر شوند.
- وابستگی به پردازش پیچیده: پردازش تصاویر و تشخیص اشیا نیازمند الگوریتمهای پیچیده هوش مصنوعی است که نیاز به قدرت محاسباتی بالایی دارد.
۳. رادار: تشخیص فاصله و سرعت اجسام در هر شرایطی
رادار چگونه کار میکند؟
رادار (Radio Detection and Ranging) از امواج رادیویی برای تشخیص اجسام، اندازهگیری فاصله و تعیین سرعت آنها استفاده میکند. این فناوری به خودروهای خودران کمک میکند تا اطلاعات دقیقی درباره اشیای متحرک مانند سایر خودروها یا عابران پیاده به دست آورند.

مزایای رادار
- عملکرد در هر شرایط آبوهوایی: برخلاف دوربین و لیدار، رادار میتواند در باران، برف، مه و حتی تاریکی شب به خوبی کار کند.
- تشخیص سرعت اجسام: برخلاف لیدار که فقط موقعیت اشیا را تشخیص میدهد، رادار میتواند سرعت آنها را نیز اندازهگیری کند.
- هزینه پایینتر نسبت به لیدار: رادار بهطور کلی ارزانتر از لیدار است و میتواند در ترکیب با سایر سنسورها برای کاهش هزینههای خودرو استفاده شود.
محدودیتهای رادار
- دقت پایینتر نسبت به لیدار: رادار توانایی ارائه جزئیات دقیق مانند شکل یا ابعاد اجسام را ندارد.
- تداخل سیگنالها: در برخی موارد، امواج راداری ممکن است با دیگر امواج الکترومغناطیسی تداخل پیدا کنند و باعث خطا در تشخیص شوند.
۴. سنسورهای اولتراسونیک: تشخیص موانع نزدیک
سنسورهای اولتراسونیک چیستند؟
سنسورهای اولتراسونیک از امواج صوتی با فرکانس بالا برای تشخیص موانع استفاده میکنند. این سنسورها معمولاً در قسمتهای جلو، عقب و کنارههای خودرو قرار میگیرند و برای تشخیص موانع نزدیک، مانند خودروهای پارکشده، دیوارها و موانع کوچک کاربرد دارند.

مزایای سنسورهای اولتراسونیک
- دقت بالا در فواصل کوتاه: این سنسورها قادرند موانع بسیار نزدیک را بهدقت تشخیص دهند.
- کاربرد در سیستمهای پارک خودکار: بسیاری از خودروهای امروزی برای کمک به پارک از این سنسورها استفاده میکنند.
- هزینه پایین: در مقایسه با لیدار و رادار، سنسورهای اولتراسونیک ارزانتر هستند.
محدودیتهای سنسورهای اولتراسونیک
- محدودیت برد: این سنسورها فقط در فواصل کوتاه مؤثر هستند.
- تأثیرپذیری از شرایط محیطی: برف، باران یا گلولای ممکن است عملکرد این سنسورها را کاهش دهد.
هر یک از این سنسورها دارای نقش ویژهای در عملکرد ماشینهای خودران هستند. برای داشتن یک سیستم ایمن و کارآمد، خودروهای خودران معمولاً از ترکیب لیدار، دوربین، رادار و سنسورهای اولتراسونیک استفاده میکنند. آینده این فناوری وابسته به پیشرفتهای بیشتر در دقت، هزینه و توانایی عملکرد در شرایط مختلف خواهد بود.
هوش مصنوعی و یادگیری ماشین: مغز خودروهای خودران
ماشینهای خودران نهتنها به مجموعهای از سنسورها برای درک محیط اطراف خود نیاز دارند، بلکه باید بتوانند این دادهها را پردازش کرده و تصمیمات منطقی و سریع بگیرند. این توانایی به لطف پیشرفتهای گسترده در حوزه هوش مصنوعی (AI) و یادگیری ماشین (Machine Learning) ممکن شده است. هوش مصنوعی به ماشینهای خودران این امکان را میدهد که محیط اطراف را تشخیص دهند، حرکت دیگر وسایل نقلیه و عابران را پیشبینی کنند و تصمیمات هوشمندانهای در لحظه اتخاذ نمایند.

هوش مصنوعی در خودروهای خودران
هوش مصنوعی در ماشینهای خودران با استفاده از مدلهای یادگیری ماشین و شبکههای عصبی مصنوعی (Neural Networks) قادر است دادههای دریافتی از سنسورها را تحلیل کرده و مسیر حرکت را تنظیم کند. الگوریتمهای یادگیری عمیق (Deep Learning) نقش مهمی در بهینهسازی عملکرد خودروهای خودران ایفا میکنند و به آنها اجازه میدهند تا از تجربیات گذشته بیاموزند و عملکرد خود را بهبود بخشند.
یکی از جنبههای کلیدی هوش مصنوعی در خودروهای خودران، توانایی پردازش حجم عظیمی از دادهها در زمان واقعی است. این خودروها باید بتوانند دادههای دریافتی از سنسورها را در کمتر از یک ثانیه تحلیل کرده و براساس آن تصمیمگیری کنند.
پردازش دادههای بصری: تشخیص اشیا در جاده
یکی از مهمترین وظایف هوش مصنوعی در خودروهای خودران، پردازش دادههای بصری است. سنسورهایی مانند دوربینها، لیدار و رادار اطلاعات خامی را در مورد محیط اطراف جمعآوری میکنند، اما این دادهها تا زمانی که پردازش و تفسیر نشوند، کاربردی نخواهند داشت.
برای درک تصاویر و ویدئوهای دریافتشده، خودروهای خودران از بینایی ماشین (Computer Vision) بهره میبرند. این فناوری از الگوریتمهای هوش مصنوعی برای تجزیهوتحلیل دادههای بصری و شناسایی اشیا استفاده میکند. الگوریتمهای یادگیری عمیق مانند شبکههای عصبی کانولوشنی (CNNs) برای این کار استفاده میشوند و میتوانند با دقت بالا تشخیص دهند که چه چیزی در محیط جاده وجود دارد.
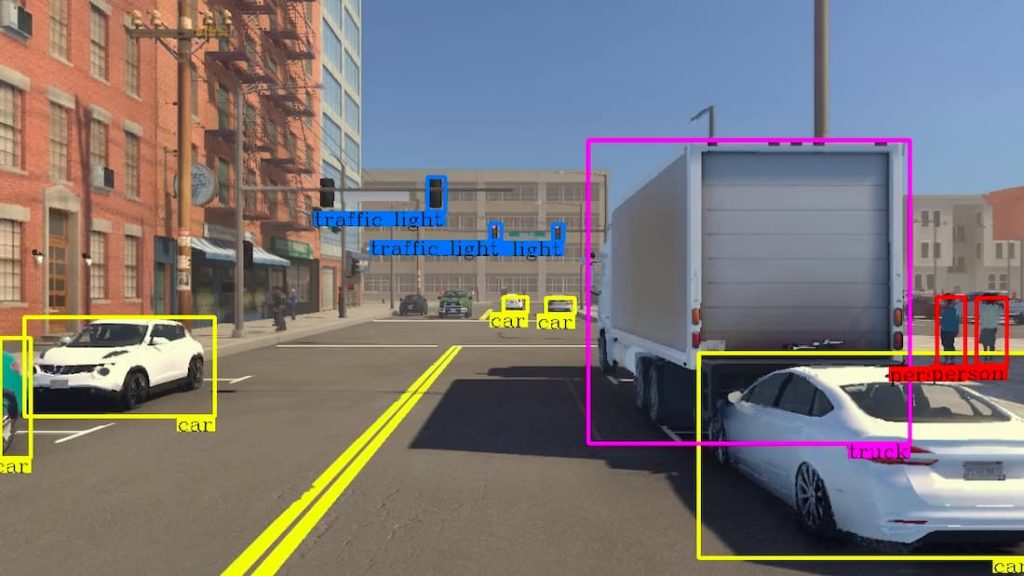
بهعنوان مثال، ماشینهای خودران باید بتوانند اشیای مختلفی را تشخیص دهند:
- خودروهای دیگر: شناسایی موقعیت، جهت حرکت و سرعت آنها.
- عابران پیاده: تشخیص موقعیت آنها و پیشبینی رفتارشان.
- علائم راهنمایی و رانندگی: خواندن و تفسیر علائمی مانند محدودیت سرعت، تابلوهای ایست و مسیرهای تعیینشده.
- خطوط جاده: تشخیص مسیر حرکت و جلوگیری از انحراف از خط جاده.
بهعنوان مثال، سیستمهای Tesla Autopilot از دوربینهای چندگانه و شبکههای عصبی عمیق برای پردازش و تحلیل تصاویر جاده و تشخیص اشیا استفاده میکنند.
پیشبینی رفتار سایر وسایل نقلیه و عابران
یکی از مهمترین چالشهای خودروهای خودران، پیشبینی رفتار وسایل نقلیه دیگر و عابران پیاده است. برخلاف یک سیستم ساده که فقط اشیا را تشخیص میدهد، یک ماشین خودران باید بتواند الگوهای رفتاری را تحلیل کرده و براساس آن پیشبینی کند که وسایل نقلیه دیگر یا عابران پیاده چه اقدامی انجام خواهند داد.
چالشهای پیشبینی رفتار:
- یک وسیله نقلیه ممکن است ناگهان تغییر مسیر دهد.
- یک عابر پیاده ممکن است بدون توجه به خودروهای در حال حرکت، از خیابان عبور کند.
- رانندگان ممکن است رفتارهای پیشبینینشده مانند تغییر مسیر ناگهانی یا توقف غیرمنتظره داشته باشند.
برای انجام این پیشبینیها، خودروهای خودران از الگوریتمهای یادگیری تقویتی (Reinforcement Learning) و مدلهای آماری پیشرفته استفاده میکنند. این الگوریتمها از تجربیات گذشته برای بهبود عملکرد سیستم و پیشبینی بهتر رفتار سایر رانندگان و عابران استفاده میکنند.
بهعنوان مثال، اگر یک عابر پیاده نزدیک به گذرگاه باشد و حرکات او نشاندهندهی قصد عبور باشد، ماشین خودران میتواند با کاهش سرعت یا توقف، از وقوع تصادف جلوگیری کند.
یکی از سیستمهای پیشرفته در این زمینه، Waymo (زیرمجموعهی گوگل) است که از حجم عظیمی از دادههای واقعی برای آموزش مدلهای خود استفاده میکند و میتواند رفتارهای پیچیده را با دقت بالا پیشبینی کند.
اتخاذ تصمیمات لحظهای: انتخاب مسیر و تنظیم سرعت
یکی از جنبههای حیاتی در عملکرد خودروهای خودران، توانایی اتخاذ تصمیمات لحظهای است. این خودروها نهتنها باید محیط را درک کرده و رفتار سایر رانندگان را پیشبینی کنند، بلکه باید بهترین اقدام ممکن را در هر لحظه انتخاب کنند.
این فرایند شامل چندین مرحله است:
- جمعآوری دادهها: دریافت اطلاعات از سنسورها (لیدار، دوربین، رادار و GPS).
- پردازش دادهها: تحلیل و تفسیر دادههای خام توسط هوش مصنوعی.
- پیشبینی سناریوهای احتمالی: مدلسازی رفتار سایر وسایل نقلیه و عابران.
- انتخاب بهترین تصمیم: تعیین مسیر بهینه، تنظیم سرعت و انجام اقدامات لازم برای جلوگیری از خطرات.
- اجرای تصمیم: کنترل فرمان، گاز و ترمز برای حرکت ایمن خودرو.
برای مثال، فرض کنید که یک خودرو خودران در یک خیابان شلوغ حرکت میکند و یک وسیله نقلیه جلویی ناگهان ترمز میزند. در این شرایط، هوش مصنوعی باید بهسرعت تصمیم بگیرد:
- آیا خودرو باید ترمز بگیرد یا تغییر مسیر دهد؟
- آیا در صورت تغییر مسیر، خط کناری خالی است یا وسیله نقلیه دیگری در آن حضور دارد؟
- آیا خودرو باید سرعت خود را کاهش دهد تا از بروز تصادف جلوگیری کند؟
تمام این تصمیمات باید در کسری از ثانیه گرفته شوند. برای این کار، خودروهای خودران از الگوریتمهای بهینهسازی مسیر و کنترل حرکت (Path Planning & Control Algorithms) استفاده میکنند.
چالشهای هوش مصنوعی در خودروهای خودران
با وجود پیشرفتهای چشمگیر در حوزهی هوش مصنوعی، هنوز چالشهایی وجود دارد که باید حل شوند:
۱) تصمیمگیری در شرایط غیرقابلپیشبینی:
- هوش مصنوعی هنوز نمیتواند مانند یک انسان در شرایط اضطراری کاملاً انعطافپذیر باشد.
- سناریوهای غیرمنتظره مانند خرابی جاده یا تصادفات ناگهانی همچنان چالشبرانگیز هستند.
۲) اخلاق در تصمیمگیری خودروهای خودران:
- اگر خودرو بین دو گزینهی تصادف با یک عابر پیاده یا برخورد با یک مانع قرار بگیرد، چه تصمیمی خواهد گرفت؟
- این مسائل از نظر اخلاقی و قانونی پیچیده هستند و هنوز بهطور کامل حل نشدهاند.
۳) محدودیتهای پردازشی:
- پردازش حجم عظیمی از دادهها در زمان واقعی نیاز به سختافزارهای قدرتمند و بهینهسازی الگوریتمها دارد.
هوش مصنوعی و یادگیری ماشین هستهی اصلی فناوری خودروهای خودران را تشکیل میدهند. این فناوریها به خودروها کمک میکنند تا محیط اطراف را درک کنند، رفتار دیگر وسایل نقلیه را پیشبینی نمایند و تصمیمات لحظهای بگیرند. با پیشرفت بیشتر در این حوزه، خودروهای خودران میتوانند ایمنتر، هوشمندتر و کارآمدتر شوند.
آیندهی این خودروها وابسته به توسعهی الگوریتمهای یادگیری عمیق، بهینهسازی سیستمهای تصمیمگیری و رفع چالشهای مربوط به هوش مصنوعی است. با بهبود این فناوریها، احتمال دارد که در آیندهای نهچندان دور، شاهد جایگزینی خودروهای سنتی با خودروهای خودران در جادههای سراسر جهان باشیم.
نقشهبرداری و مسیریابی: هدایت خودرو در جادهها
یکی از مهمترین نیازهای خودروهای خودران، توانایی مسیریابی هوشمند و حرکت در مسیرهای مشخصشده است. این خودروها برای انجام این وظیفه به سیستمهای پیچیدهای از نقشهبرداری دقیق، فناوری GPS و الگوریتمهای هوش مصنوعی نیاز دارند. برخلاف خودروهای سنتی که راننده مسیر را از طریق نشانههای بصری و نقشههای دیجیتال پیدا میکند، خودروهای خودران باید بهطور کاملاً مستقل تصمیم بگیرند که چگونه از یک نقطه به نقطهی دیگر حرکت کنند.

مسیریابی هوشمند در خودروهای خودران شامل دو بخش اساسی است:
۱) نقشههای دقیق با وضوح بالا (HD Maps) که شامل اطلاعات بسیار جزئی دربارهی جادهها، مسیرها و زیرساختهای شهری است.
۲) سیستم مسیریابی و GPS که به خودرو کمک میکند تا موقعیت خود را در محیط تشخیص داده و بر اساس دادههای ترافیکی و شرایط جاده، بهترین مسیر را انتخاب کند.
در ادامه، هر یک از این بخشها را بهطور جامع بررسی میکنیم.
نقشههای دقیق با وضوح بالا (HD Maps)
اهمیت نقشههای HD در خودروهای خودران
خودروهای خودران برای حرکت ایمن و صحیح نیاز به نقشههای دقیقتری نسبت به نقشههای معمولی دارند. نقشههای با وضوح بالا (High Definition Maps یا HD Maps) شامل جزئیات بسیار دقیقی از مسیر، موانع، چراغهای راهنمایی، خطوط جاده، تابلوهای ترافیکی و حتی ارتفاع و شیب جادهها هستند.
برخلاف نقشههای سنتی که فقط مسیرها را نمایش میدهند، نقشههای HD شامل اطلاعاتی با دقت چند سانتیمتر هستند که به خودرو اجازه میدهند محیط را با جزئیات بالا درک کرده و تصمیمات دقیقی بگیرند.

ویژگیهای کلیدی نقشههای HD
- دقت بالا: این نقشهها دارای جزئیاتی مانند عرض خطوط جاده، موقعیت چراغهای راهنمایی، تابلوهای ترافیکی و موانع هستند.
- سهبعدی بودن: برخلاف نقشههای معمولی، نقشههای HD دارای مدلهای سهبعدی از محیط هستند که اطلاعاتی دربارهی ارتفاع پلها، شیب جاده و پستی و بلندیهای سطح مسیر ارائه میدهند.
- بهروزرسانی زنده: نقشههای HD نیاز به بروزرسانی مداوم دارند تا تغییرات جادهای مانند بستهشدن مسیرها، ایجاد مسیرهای جدید و علائم موقتی را در نظر بگیرند.
- همگامسازی با حسگرها: این نقشهها با دادههای دریافتشده از سنسورهای لیدار، دوربین و رادار ترکیب میشوند تا خودرو بتواند موقعیت خود را بهطور دقیق تشخیص دهد.
چگونه نقشههای HD ایجاد میشوند؟
نقشههای HD از طریق ترکیبی از فناوریهای مختلف ساخته میشوند:
۱) لیدار و سنسورهای پیشرفته: خودروهای نقشهبردار (مانند ماشینهای گوگل مپس) با استفاده از لیدار و دوربینهای ۳۶۰ درجه اطلاعات دقیق محیط را ثبت میکنند.
۲) هوش مصنوعی و یادگیری ماشین: این دادهها سپس توسط الگوریتمهای یادگیری ماشین پردازش شده و به نقشههای دقیق تبدیل میشوند.
۳) بهروزرسانیهای آنی: خودروهای خودران از طریق اتصال به پایگاه دادهی مرکزی، تغییرات جدید را دریافت کرده و مسیرهای خود را بر اساس آخرین اطلاعات تطبیق میدهند.
مزایای نقشههای HD برای خودروهای خودران
- کمک به تصمیمگیری سریعتر: با داشتن اطلاعات دقیق دربارهی مسیر، خودروهای خودران میتوانند تصمیمات سریعتری بگیرند.
- کاهش وابستگی به حسگرها: اگر سنسورها به هر دلیلی دچار خطا شوند، نقشههای HD میتوانند جایگزین مناسبی باشند.
- بهبود رانندگی ایمن: اطلاعات دقیق از جاده و موانع به کاهش تصادفات کمک میکند.
با وجود این مزایا، نقشههای HD همچنان با چالشهایی مانند نیاز به بهروزرسانی مداوم، هزینههای بالا و سازگاری با مناطق مختلف جهان روبهرو هستند.
سیستم مسیریابی و GPS: یافتن بهترین مسیر حرکت
چرا GPS بهتنهایی کافی نیست؟
سیستمهای ناوبری سنتی که بر اساس GPS کار میکنند، برای خودروهای خودران کافی نیستند. GPS معمولی دقتی در حدود ۵ تا ۱۰ متر دارد، درحالیکه خودروهای خودران برای عملکرد دقیق به دقتی در حد چند سانتیمتر نیاز دارند.
به همین دلیل، سیستم مسیریابی خودروهای خودران از ترکیبی از GPS، دادههای نقشههای HD، سنسورهای خودرو و هوش مصنوعی استفاده میکند تا بهترین مسیر ممکن را تعیین کند.
اجزای کلیدی سیستم مسیریابی خودروهای خودران
۱) GPS پیشرفته (RTK-GPS)
- این فناوری با استفاده از سامانه موقعیتیابی آنی (Real-Time Kinematics یا RTK) دقت مکانیابی را به حد چند سانتیمتر افزایش میدهد.
- دادههای GPS با دادههای ماهوارهای و ایستگاههای زمینی ترکیب شده و اطلاعات دقیقتری از موقعیت خودرو ارائه میدهد.
۲) هوش مصنوعی برای انتخاب مسیر بهینه
- هوش مصنوعی در خودروهای خودران دادههای نقشه، شرایط جاده و اطلاعات ترافیکی را تجزیهوتحلیل کرده و بهترین مسیر را پیشنهاد میدهد.
- اگر مسیر انتخابشده به هر دلیلی مسدود شود، سیستم میتواند مسیر جایگزین را پیدا کند.
۳) دادههای ترافیکی لحظهای
خودروهای خودران به سرورهای مرکزی متصل شده و اطلاعاتی دربارهی وضعیت ترافیک، تصادفات، بستهشدن جادهها و شرایط آبوهوا را دریافت میکنند.
چالشهای سیستمهای مسیریابی خودروهای خودران
- خطای GPS در مناطق شهری پرجمعیت: در خیابانهای شلوغ و بین ساختمانهای بلند، دقت GPS کاهش مییابد.
- مشکلات بهروزرسانی نقشهها: تغییرات ناگهانی در مسیرهای جادهای ممکن است باعث ایجاد خطا در مسیریابی خودرو شود.
- نیاز به پردازش لحظهای اطلاعات: خودروهای خودران باید بتوانند دادههای GPS، نقشههای HD و حسگرها را در زمان واقعی پردازش کنند.
چگونه خودروهای خودران مسیر خود را پیدا میکنند؟
۱. دریافت دادهها از GPS و نقشههای HD
در مرحلهی اول، خودرو اطلاعات مربوط به موقعیت مکانی خود را از GPS و نقشههای دقیق دریافت میکند. سپس این دادهها با اطلاعات دریافتی از سنسورها مانند لیدار و دوربین مقایسه میشود.
۲. شناسایی مسیر بهینه با کمک هوش مصنوعی
خودرو با استفاده از الگوریتمهای هوش مصنوعی، مسیر مناسب را با توجه به شرایط جاده، ترافیک و موانع موجود انتخاب میکند.
۳. مسیریابی لحظهای و اصلاح مسیر
اگر در حین حرکت تغییری در شرایط جاده ایجاد شود (مانند بسته شدن مسیر)، خودرو بهطور هوشمند مسیر خود را اصلاح کرده و بهترین جایگزین را پیدا میکند.
مسیریابی و نقشهبرداری از ارکان اساسی در عملکرد خودروهای خودران هستند. نقشههای HD با دقت بالا اطلاعات کاملی از محیط ارائه میدهند، درحالیکه سیستم مسیریابی و GPS به خودرو کمک میکند تا موقعیت خود را تشخیص داده و بهترین مسیر را انتخاب کند.
ترکیب این فناوریها با هوش مصنوعی، خودروهای خودران را قادر میسازد تا بهطور ایمن و کارآمد در جادهها حرکت کنند. با پیشرفتهای بیشتر در این حوزه، خودروهای خودران بهزودی قادر خواهند بود که با دقت بیشتری مسیرهای بهینه را انتخاب کرده و تجربهای ایمنتر برای سرنشینان فراهم کنند.
ارتباطات خودرو با زیرساختها (V2X): آیندهای هوشمند برای حملونقل
فناوری ارتباطات خودرو با محیط اطراف (V2X) یکی از نوآوریهای کلیدی در توسعهی خودروهای خودران محسوب میشود. این فناوری به وسایل نقلیه این امکان را میدهد که بهصورت بیسیم با سایر خودروها، زیرساختهای شهری و حتی عابران پیاده ارتباط برقرار کنند. ارتباطات V2X نهتنها باعث بهبود ایمنی جادهها میشود، بلکه کارایی ترافیک را افزایش داده و تجربهی رانندگی را بهبود میبخشد.

در یک سیستم حملونقل هوشمند، خودروهای خودران تنها به سنسورها و الگوریتمهای داخلی خود متکی نیستند، بلکه از اطلاعات دریافتی از دیگر وسایل نقلیه، چراغهای راهنمایی، تابلوهای دیجیتالی و حتی گوشیهای هوشمند عابران پیاده نیز استفاده میکنند. این تبادل اطلاعات در زمان واقعی به آنها کمک میکند تا تصمیمات بهتری بگیرند و واکنش سریعتری نسبت به شرایط پیشبینینشده جاده داشته باشند.
سیستم ارتباطات V2X شامل سه بخش اصلی است:
- ارتباط خودرو با خودرو (V2V)
- ارتباط خودرو با زیرساختهای شهری (V2I)
- ارتباط خودرو با عابران پیاده (V2P)
در ادامه، این فناوریها را با جزئیات بررسی میکنیم.
۱. ارتباط خودرو با خودرو (V2V): تعامل مستقیم میان وسایل نقلیه
V2V چیست و چگونه کار میکند؟
ارتباط خودرو با خودرو (Vehicle-to-Vehicle) نوعی ارتباط بیسیم است که به وسایل نقلیه امکان میدهد تا اطلاعاتی دربارهی سرعت، موقعیت، جهت حرکت و شرایط ترافیکی را با یکدیگر به اشتراک بگذارند. این ارتباط باعث میشود خودروهای خودران بتوانند بهتر مسیر خود را مدیریت کرده و از تصادفات جلوگیری کنند.
V2V با استفاده از فناوری DSRC (Dedicated Short-Range Communications) یا 5G امکان ارسال و دریافت اطلاعات را بین خودروها فراهم میکند. این سیستم در هر ثانیه چندین پیام را تبادل میکند تا خودروها بتوانند تصمیمات لحظهای بگیرند.
مزایای V2V در خودروهای خودران
- جلوگیری از تصادفات: خودروهای مجهز به V2V میتوانند از تغییر مسیر ناگهانی یا ترمزهای اضطراری خودروهای جلویی مطلع شوند و واکنش سریعی نشان دهند.
- کاهش ترافیک: با بهاشتراکگذاری اطلاعات دربارهی شرایط جاده، خودروها میتوانند بهینهترین مسیر را انتخاب کنند.
- بهبود هماهنگی در رانندگی خودکار: خودروهای خودران میتوانند در کاروانهای هماهنگ (Platooning) حرکت کنند، یعنی بهطور خودکار فاصلهی ایمن را حفظ کرده و مصرف سوخت را کاهش دهند.
مثالهای عملی از کاربرد V2V
۱) هشدار دربارهی خطرات جادهای: اگر یک خودرو به مانعی برخورد کند یا ناگهان ترمز بگیرد، این اطلاعات بهسرعت به سایر خودروهای پشت سر ارسال میشود.
۲) مدیریت چراغهای ترمز: خودروهای متصل میتوانند زمان ترمز گرفتن یکدیگر را پیشبینی کرده و سرعت خود را تنظیم کنند.
۳) رانندگی هماهنگ در بزرگراهها: خودروها میتوانند بهطور گروهی حرکت کرده و جریان ترافیک را بدون توقفهای ناگهانی بهبود دهند.
۲. ارتباط خودرو با زیرساختهای شهری (V2I): تعامل با تجهیزات جادهای
V2I چیست و چگونه کار میکند؟
ارتباط خودرو با زیرساختهای شهری (Vehicle-to-Infrastructure) به وسایل نقلیه این امکان را میدهد که بهصورت بیسیم با چراغهای راهنمایی، تابلوهای دیجیتالی، سنسورهای جادهای و دیگر تجهیزات شهری ارتباط برقرار کنند. این فناوری کمک میکند خودروهای خودران اطلاعات دقیقتری دربارهی شرایط جاده و تغییرات ترافیکی دریافت کنند.
مزایای V2I در خودروهای خودران
- افزایش ایمنی: خودروهای خودران میتوانند هشدارهای لازم را از چراغهای راهنمایی دریافت کرده و سرعت خود را تنظیم کنند.
- بهبود مدیریت ترافیک: اطلاعات دریافتی از زیرساختهای شهری کمک میکند خودروها مسیرهای کمترافیک را انتخاب کنند.
- کاهش آلودگی هوا: از آنجا که خودروهای متصل میتوانند بهینهتر حرکت کنند، مصرف سوخت و انتشار گازهای گلخانهای کاهش مییابد.
مثالهای عملی از کاربرد V2I
۱) مدیریت هوشمند چراغهای راهنمایی: یک چراغ راهنمایی میتواند اطلاعات مربوط به زمان تغییر رنگ خود را به خودروهای نزدیک ارسال کند، تا آنها بدون توقف ناگهانی سرعت خود را تنظیم کنند.
۲) هشدارهای جادهای: اگر یک جاده مسدود شده یا شرایط خطرناکی مانند یخزدگی دارد، این اطلاعات به خودروها ارسال میشود.
۳) اتصال به پارکینگهای هوشمند: خودروهای خودران میتوانند با سیستمهای پارکینگ شهری ارتباط برقرار کرده و نزدیکترین جای پارک خالی را پیدا کنند.
۳. ارتباط خودرو با عابران پیاده (V2P): افزایش ایمنی برای افراد پیاده
V2P چیست و چگونه کار میکند؟
ارتباط خودرو با عابران پیاده (Vehicle-to-Pedestrian) یکی از جدیدترین فناوریهای V2X است که به خودروهای خودران کمک میکند تا از حضور افراد در خیابان مطلع شده و اقدامات ایمنی لازم را انجام دهند. این ارتباط میتواند از طریق گوشیهای هوشمند، ساعتهای هوشمند و دیگر دستگاههای پوشیدنی برقرار شود.
مزایای V2P در خودروهای خودران
- جلوگیری از تصادفات با عابران پیاده: خودروهای خودران میتوانند از طریق سیگنالهای ارسالشده توسط گوشیهای هوشمند، حضور عابران را حتی در نقاط کور تشخیص دهند.
- هشدارهای هوشمند برای عابران: اگر یک فرد در حال عبور از خیابان باشد، خودرو میتواند هشدارهای لازم را برای او ارسال کند.
- افزایش ایمنی دوچرخهسواران: سیستم V2P میتواند دوچرخهسواران را شناسایی کرده و خودروهای خودران را برای جلوگیری از برخورد با آنها هدایت کند.
مثالهای عملی از کاربرد V2P
۱) هشدار عبور عابران در نقاط کمدید: در مناطقی که دید خودرو محدود است، سیستم V2P میتواند هشدارهایی برای جلوگیری از برخورد ارسال کند.
۲) توقف خودکار در مسیرهای مدرسه: اگر یک خودرو خودران متوجه حضور دانشآموزان در مسیر مدرسه شود، میتواند سرعت خود را کاهش داده و ایمنی بیشتری فراهم کند.
۳) تشخیص دوچرخهسواران: اگر یک دوچرخهسوار از کنار یک خودرو خودران عبور کند، سیستم V2P میتواند خودرو را از این موضوع مطلع کند تا برخوردی رخ ندهد.
چالشهای پیادهسازی فناوری V2X
۱. زیرساختهای شهری ناکافی
بسیاری از شهرها هنوز زیرساختهای لازم برای پشتیبانی از فناوری V2X را ندارند. نصب سنسورها، چراغهای راهنمایی هوشمند و تجهیزات ارتباطی هزینهبر است.
۲. مشکلات امنیتی و حفظ حریم خصوصی
از آنجا که این فناوری نیاز به تبادل اطلاعات در زمان واقعی دارد، خطراتی مانند هک شدن سیستمها یا سرقت دادههای شخصی وجود دارد.
۳. عدم یکپارچگی بین وسایل نقلیه مختلف
برای اینکه V2X بهطور مؤثر عمل کند، همهی وسایل نقلیه باید به این سیستم مجهز باشند. اما هنوز بسیاری از خودروهای سنتی قابلیت پشتیبانی از این فناوری را ندارند.
فناوری V2X یکی از کلیدیترین پیشرفتها در حوزهی حملونقل هوشمند و خودروهای خودران است. این فناوری با بهبود ایمنی، کاهش تصادفات و افزایش بهرهوری ترافیک، آیندهای کارآمدتر و ایمنتر را برای جادهها رقم خواهد زد. با گسترش زیرساختهای شهری و پیشرفت در ارتباطات بیسیم، استفاده از V2X بهتدریج افزایش خواهد یافت و خودروهای خودران بهطور کامل قادر خواهند بود تا با محیط اطراف خود هماهنگ شوند.
جمعبندی: آیندهی خودروهای خودران
ماشینهای خودران بهعنوان یکی از پیشرفتهترین نوآوریهای تکنولوژی، ترکیبی از چندین فناوری هوشمند را در خود جای دادهاند. این خودروها برای حرکت ایمن و مستقل، از سنسورها، هوش مصنوعی، نقشههای دقیق دیجیتالی و سیستمهای ارتباطی بیسیم بهره میبرند. هر یک از این فناوریها به شکلی خاص در بهبود عملکرد این وسایل نقلیه نقش دارند و باعث افزایش ایمنی، کاهش تصادفات و بهینهسازی حرکت در جادهها میشوند.
۱. سنسورها – چشمهای خودروهای خودران
سنسورهایی مانند لیدار، دوربینها، رادار و حسگرهای اولتراسونیک به خودروهای خودران این امکان را میدهند که محیط اطراف خود را شناسایی کرده، موانع را تشخیص داده و اطلاعات دقیقی از مسیر، دیگر وسایل نقلیه و عابران پیاده دریافت کنند. ترکیب این سنسورها باعث میشود خودروها بتوانند در شرایط مختلف، از جادههای شلوغ تا خیابانهای بارانی، عملکرد قابل اعتمادی داشته باشند.
۲. هوش مصنوعی و یادگیری ماشین – مغز خودروهای خودران
خودروهای خودران با کمک هوش مصنوعی و الگوریتمهای یادگیری ماشین قادرند دادههای عظیمی را که از سنسورها دریافت میکنند، پردازش کرده و تصمیمات لحظهای بگیرند. این فناوری باعث میشود ماشین بتواند مسیر حرکت را تعیین کند، رفتار سایر رانندگان را پیشبینی نماید و در شرایط مختلف، بهترین واکنش را از خود نشان دهد.
۳. نقشههای دیجیتالی و مسیریابی هوشمند
برای هدایت دقیق، خودروهای خودران از نقشههای با وضوح بالا (HD Maps) و GPS پیشرفته استفاده میکنند. این نقشهها اطلاعات جزئی مانند عرض جاده، شیب مسیر، علائم راهنمایی، چراغهای راهنمایی و موانع احتمالی را نمایش میدهند و در هماهنگی با دادههای لحظهای از جاده، به خودرو کمک میکنند مسیر خود را با دقت بالا تنظیم کند.
۴. ارتباطات بیسیم (V2X) – هماهنگی خودرو با محیط اطراف
یکی از بخشهای کلیدی در فناوری خودروهای خودران، ارتباطات هوشمند آنها با سایر خودروها، زیرساختهای شهری و عابران پیاده است. از طریق فناوری V2V (ارتباط خودرو با خودرو)، خودروهای خودران میتوانند از تغییرات مسیر یا ترمز ناگهانی دیگر وسایل نقلیه مطلع شوند. همچنین با استفاده از V2I (ارتباط خودرو با زیرساختها)، میتوانند دادههایی مانند وضعیت ترافیک، زمان تغییر چراغهای راهنمایی و شرایط جاده را دریافت کرده و بر اساس آن، بهترین مسیر را انتخاب کنند. ارتباط V2P (ارتباط خودرو با عابران پیاده) نیز باعث افزایش ایمنی عابران در سطح شهر میشود.
آیا خودروهای خودران جایگزین رانندگان خواهند شد؟
با وجود پیشرفتهای چشمگیر در این حوزه، هنوز چالشهایی مانند امنیت سایبری، تصمیمگیری در شرایط غیرمنتظره، هزینههای بالا و پذیرش عمومی این فناوری وجود دارد. با این حال، خودروهای خودران آیندهی حملونقل را متحول خواهند کرد و با پیشرفت بیشتر، احتمال دارد که در دهههای آینده به جایگزین اصلی رانندگان انسانی تبدیل شوند.
نظر شما چیست؟ آیا خودروهای خودران میتوانند بهزودی جای رانندگان سنتی را بگیرند؟ دیدگاه خود را در بخش نظرات با ما به اشتراک بگذارید!
برنامه زمانبندی انتشار مقالات ماشینهای خودران
این جدول شامل زمانبندی دقیق و عنوانهای پستهای مرتبط با ماشینهای خودران است که در یک مجموعه ۵ قسمتی به بررسی جامع این فناوری شگفتانگیز میپردازد. از تعریف و تاریخچه ماشینهای خودران تا بررسی مزایا، چالشها و آینده این تکنولوژی، هر پست به زبان ساده و جذاب اطلاعاتی مفید برای علاقهمندان و عموم مردم ارائه میدهد. این برنامه به شما کمک میکند تا مسیر یادگیری خود را به شکل منظم و ساختاریافته دنبال کنید.
| شماره پست | عنوان پست (امکان تغییر وجود دارد) | زمان انتشار |
| پست اول | ماشینهای خودران، سفری به آیندهای بدون راننده | ۳ اسفند |
| پست دوم | چگونه کار میکنند؟ (فناوریهای زیربنایی) | ۱۰ اسفند |
| پست سوم | مزایا و چالشهای ماشینهای خودران | ۱۷ اسفند |
| پست چهارم | وضعیت فعلی و آینده ماشینهای خودران | ۲۴ اسفند |
| پست پنجم | ماشینهای خودران برای همه؟ (نگاهی به جنبههای انسانی) | ۲ فرودرین |










[…] چگونه کار میکنند؟ (فناوریهای زیربنایی) […]